





















همه محصولات
X-Y-Z هماهنگی بازوی رباتیک روبات EOD متوسط







| محل منبع | چین |
|---|---|
| نام تجاری | Particle |
| شماره مدل | REOD500 |
| مقدار حداقل تعداد سفارش | 1 |
| قیمت | $205,761 |
| شرایط پرداخت | T/T |

برای نمونه ها و کوپن های رایگان با من تماس بگیرید.
WhatsApp:0086 18588475571
ویچت: 0086 18588475571
اسکایپ: sales10@aixton.com
اگر شما هر گونه نگرانی دارید، ما 24 ساعت کمک آنلاین ارائه می دهیم.
xجزئیات محصول
| حداکثر سرعت | ≥2m/s (5 دنده، متغیر پیوسته) | ویژگی های خاص | ضد انفجار، ضد آب، قابلیت خلع سلاح از راه دور |
|---|---|---|---|
| نام محصول | اهداف مأموریت ربات EOD Hound-III برای اقدامات دفع و انتقال خطر | ویژگی ها | 1. طراحی بازوی مکانیکی با استحکام بالا، عملکرد قدرتمند در قاپ را به ارمغان می آورد؛ سیستم مسیر تعلیق |
| وزن پلت فرم ربات | ≤350 کیلوگرم (حاوی باتری)؛ | ربات سکوی عمق Wading | ≥500mm |
| درخواست ها | پاسخ به مواد منفجره دست ساز | اندازه پلتفرم ربات | 1600×850×1300 میلی متر ((به طور کامل بسته شده) ؛ |
| اندازه ربات | ≤950×650×650mm (کاملاً ذخیره شده) | وزن ربات | ≤50 کیلوگرم (حاوی دو مجموعه باتری) |
| توانایی بیش از مانع | ≥400 میلی متر | عرض شکاف | ≥400 میلی متر |
| درجه بندی | ≥45 درجه | از پله ها بالا برو | ≥45 درجه |
| عمق آب | ≥200 میلی متر | عمر باتری (دمای معمولی) | ≥3 ساعت |
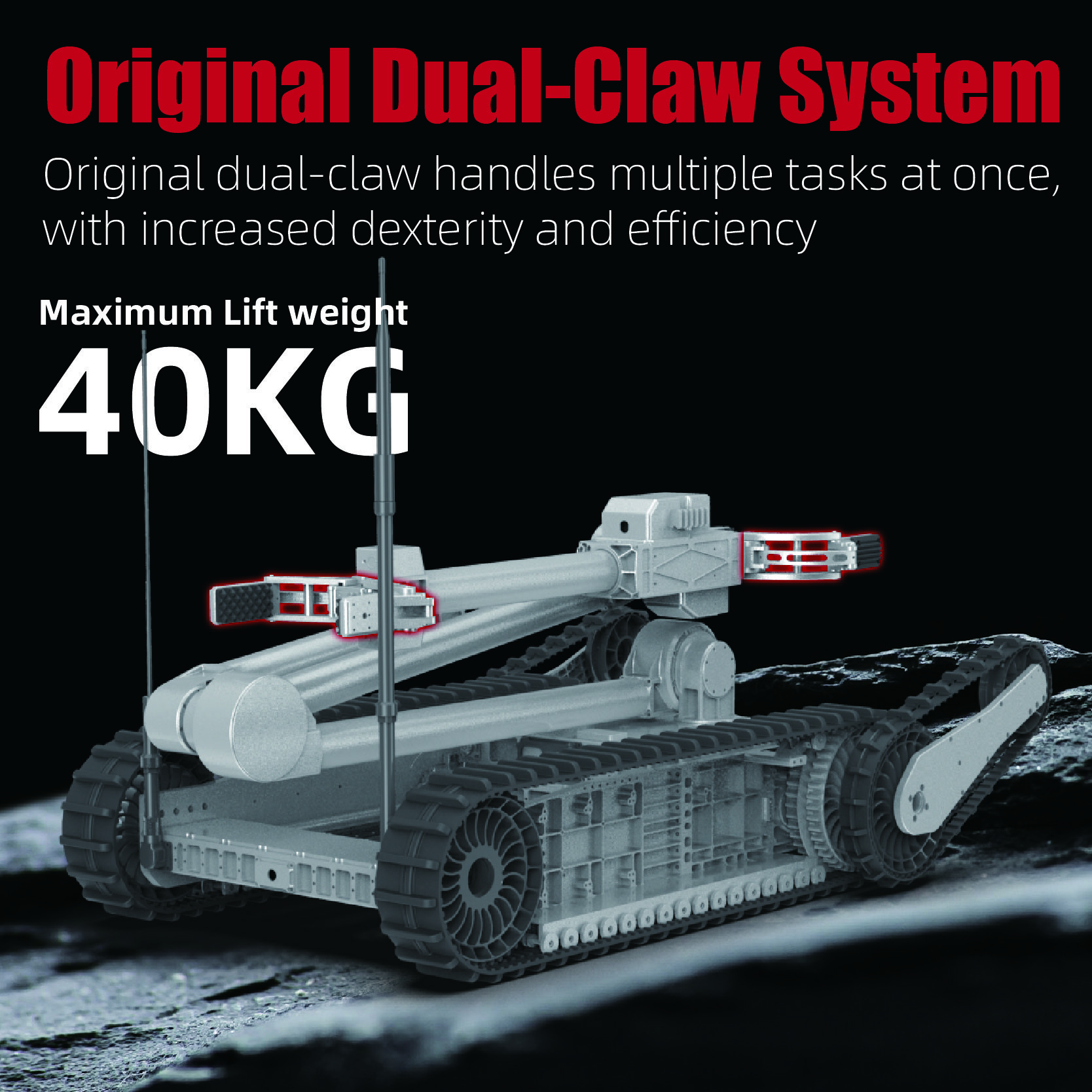
| طول بازو | 2000 میلی متر | حداکثر وزن قاپ | ≥40 کیلوگرم |
| پنجه ها | 2 | مفاصل متحرک | 8 |
| اندازه کنترل کننده | ≤270mm×170mm×100mm | وزن کنترل کننده | ≤1.2 کیلوگرم (بدون کوله پشتی) |
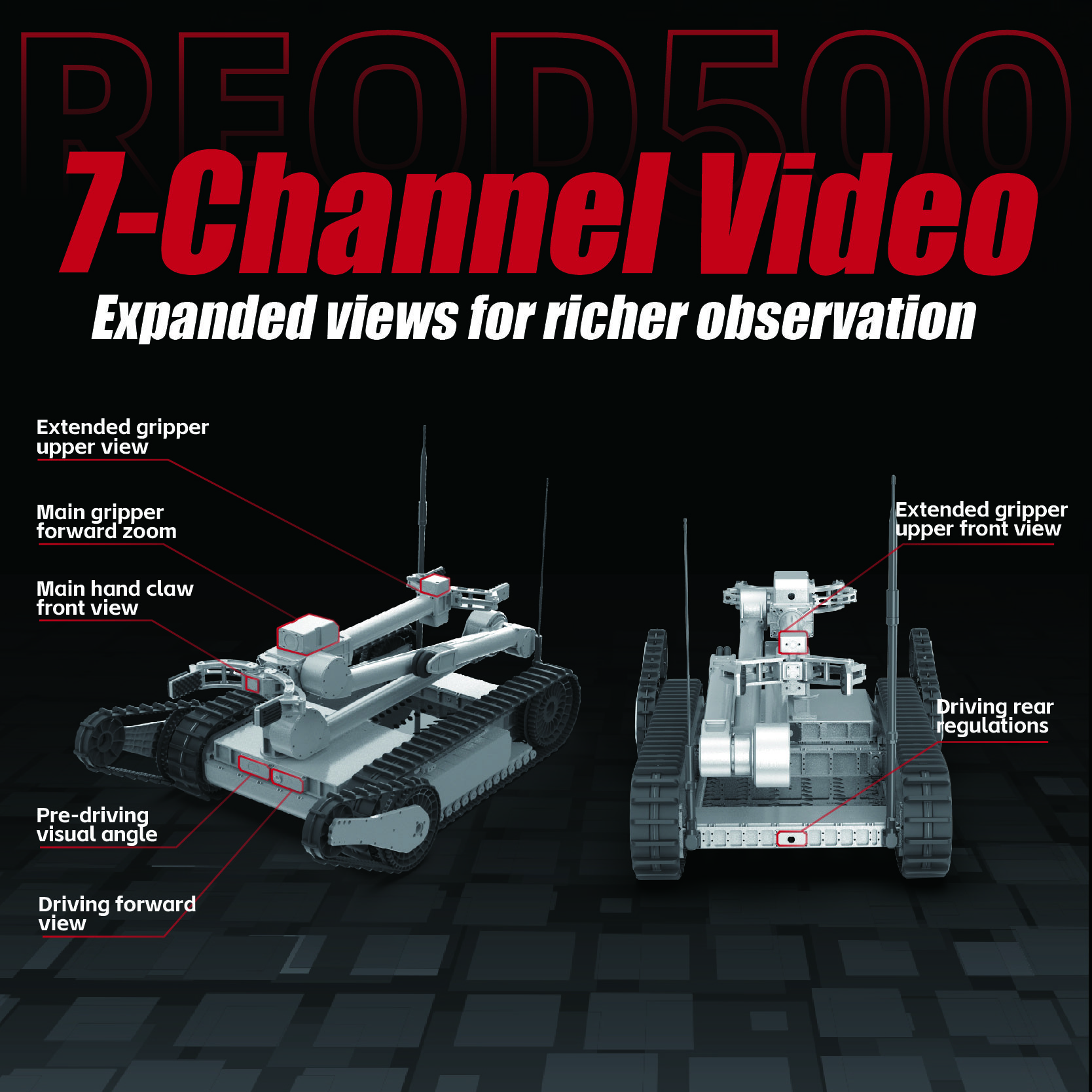
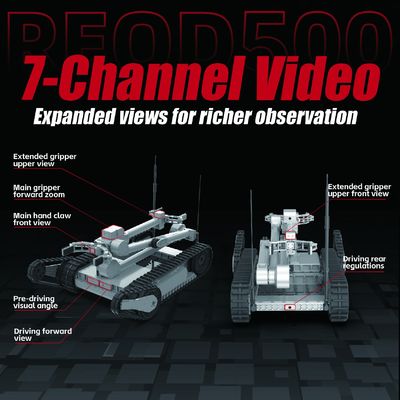
| صفحه نمایش کنترلر | ال سی دی 7 اینچی | نمایش ویدیو | 7 کانال که یکی از آنها عملکرد بزرگنمایی فوکوس خودکار دارد |
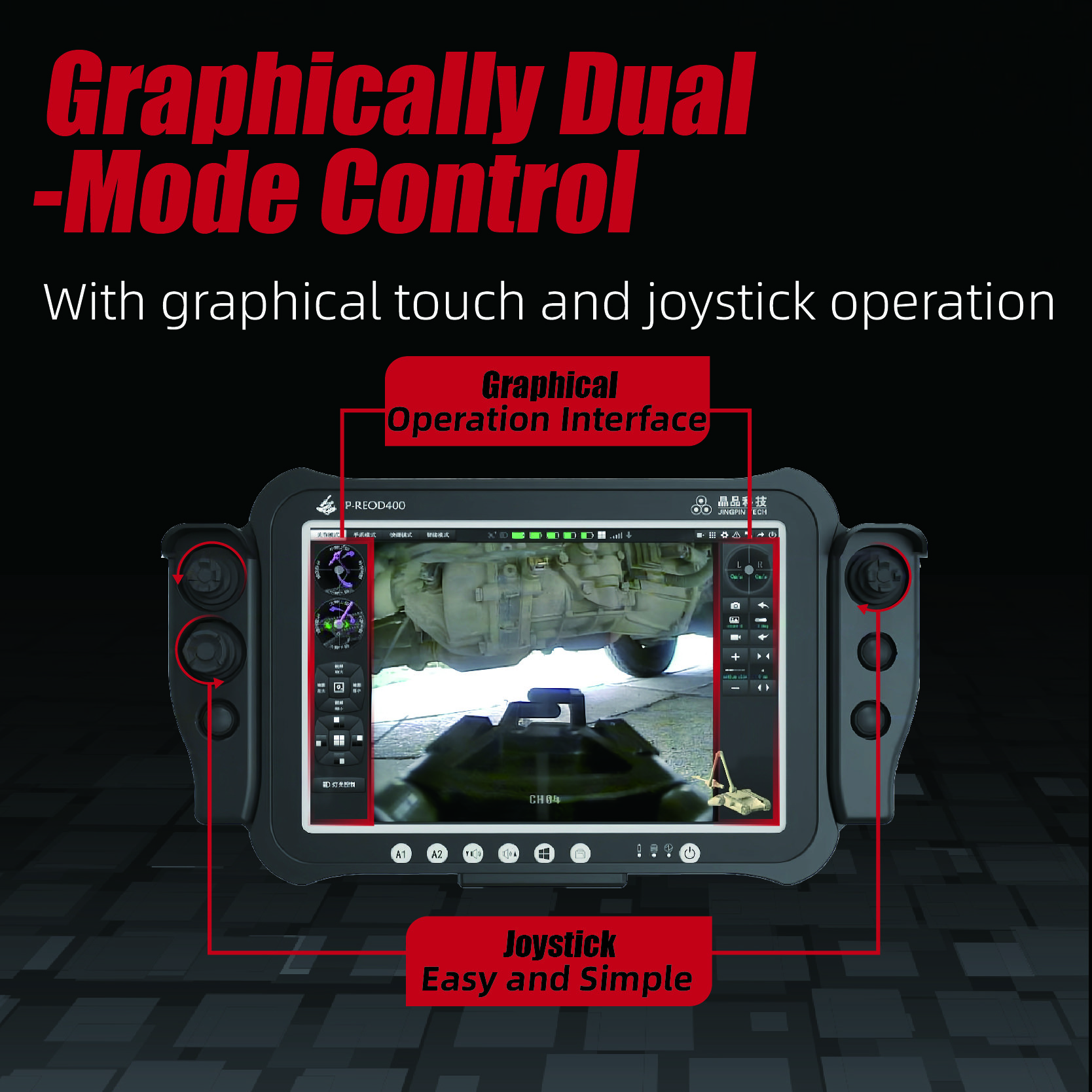
| روش عملیات | دو حالت کار با دکمه و صفحه لمسی | روش کنترل | کنترل کابل≥ 100 متر (کابل استاندارد)، کنترل بی سیم≥ 1000 متر (در فضای باز) |
| درجه IP پلت فرم ربات | IP66 | درجه IP بازو | IP66 |
| دمای کار | -40 تا 50 ℃ | دمای ذخیره سازی | -45 تا 60 درجه سانتیگراد |
| برجسته کردن | ربات هدايت کننده بازو رباتيک براي تصفيه مهمات منفجره,ربات تخلیه سلاح های منفجره متوسط,IP66 ربات های eod,Medium Explosive Ordnance Disposal Robot,IP66 robots eod |
||
توضیحات محصول
تولید کنندگان روبات های پیشرفته X-Y-Z
توضیحات و ویژگی ها
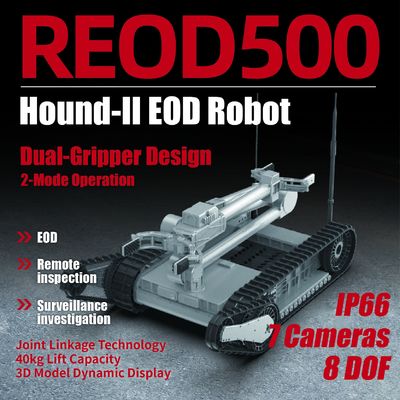
ربات JP REOD500 EOD یک راه حل پیشرفته برای دفع مهمات انفجاری در محیط های پرخطر است.دارای یک سیستم خزنده با بازوی تکان دهنده که خزنده اصلی را با مکانیسم مانع با بازوی تکان دهنده ترکیب می کند، این طراحی به طور قابل توجهی توانایی های روبات را در مسیر عبور از موانع بهبود می بخشد و عملکرد قوی و قابل اعتماد را در عملیات EOD تضمین می کند.این ربات مجهز به یک بازوی رباتیک با چندین درجه آزادی است که توانایی های قدرتمندی برای گرفتن و دست زدن را فراهم می کندJP REOD500 ابعاد ≤900mm × 650mm × 500mm (به طور کامل بسته شده) و وزن ≤42kg دارد. حداکثر سرعت ≥2.0m/s، فاصله مانع ≥320mm،و قابلیت ارتقا و صعود پله تا 45 درجه، تضمین مانور در زمین های مختلف.
مجهز به یک دستکاری 8 درجه آزادی، JP REOD500 کنترل دقیق را با حداکثر ارتفاع گرفتن ≥1800mm (نقش اصلی) و دورترین فاصله گرفتن ≥1400mm (نقش اصلی) ارائه می دهد.ربات از یک صفحه نمایش ویدئویی 7 کانال پشتیبانی می کند، امکان مشاهده چشم انداز غنی تر را فراهم می کند و دارای قابلیت های نمایش دراز مدت حالت 3D در زمان واقعی است. با عمر باتری ≥3 ساعت در دمای طبیعی،درجه IP67 برای مقاومت در برابر گرد و غبار و آب، و روش های کنترل شامل کنترل کابل تا 120 متر و کنترل بی سیم تا 1200 متر، JP REOD500 برای قابلیت اطمینان و انعطاف پذیری در شرایط چالش برانگیز ساخته شده است.این گزینه های سفارشی سازی OEM و ODM را برای پاسخگویی به نیازهای عملیاتی خاص ارائه می دهد.
طراحی پیشرفته ی بازوی مکانیکی
JP REOD500 دارای یک طراحی بازوی مکانیکی پیشرفته است که به طور قابل توجهی توانایی های گرفتن آن را بهبود می بخشد.این طراحی پیشرفته به این ربات اجازه می دهد که با دقت و قدرت بیشتری از انواع اجسام خطرناک استفاده کند، افزایش کارایی کلی عملیات EOD.
طراحی اختراعی نوآورانه "دو پنجه" ️ قابلیت های چند وظیفه
طراحی ثبت شده "دو پنجه" اجازه می دهد JP REOD500 به طور همزمان چندین کار را حل کند. با هر دو پنجه اصلی و یک پنجه کمکی، ربات می تواند عملیات پیچیده را انجام دهد،مانند گرفتن اشیاء در حالی که درها را باز می کنید یا انجام سایر وظایف کمکی، که باعث می شود برای ماموریت های EOD بسیار موثر باشد.
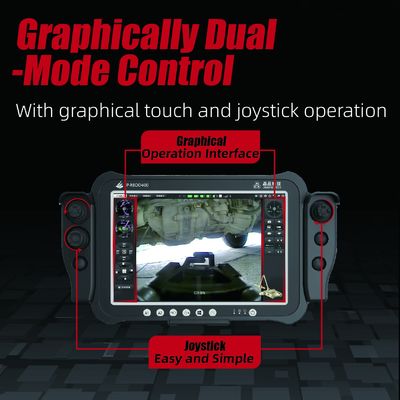
عملکرد دو حالت گرافیکی ️ تجربه عملیاتی راحت و قابل اعتماد
عملکرد دو حالت گرافیکی به کاربران یک رابط کاربری بصری برای کنترل ربات را فراهم می کند. هر دو کنترل صفحه لمسی و جویستیک پشتیبانی می شود.اطمینان از سهولت استفاده و قابلیت اطمینان در محیط های با استرس بالااین طراحی نیاز کاربران را به حفظ عملکردهای پیچیده دکمه حذف می کند، زمان آموزش را کاهش می دهد و کارایی عملیاتی را بهبود می بخشد.
نمایشگر 3D از راه دور در زمان واقعی
JP REOD500 از تکنولوژی پیشرفته نمایش مجازی سه بعدی برای بازخورد در زمان واقعی وضعیت روبات استفاده می کند. این ویژگی به اپراتورها امکان می دهد وضعیت سه بعدی روبات را از زاویه های مختلف مشاهده کنند.ارائه درک بصری و دقیق از موقعیت و محیط ربات، حتی وقتی که از خط دید خارج شده باشد.
طراحی کنترل هوشمند پیش تنظیم شده
طراحی هوشمند کنترل "پیش تنظیم" اجازه می دهد JP REOD500 به طور خودکار به موقعیت های پیش تنظیم شده با یک کلیک، بر اساس نیازهای کاربر برسد. این ویژگی روند عملیات را ساده می کند،کاهش میزان مداخله دستی مورد نیاز و اطمینان از اجرای سریع و قابل اعتماد کار.
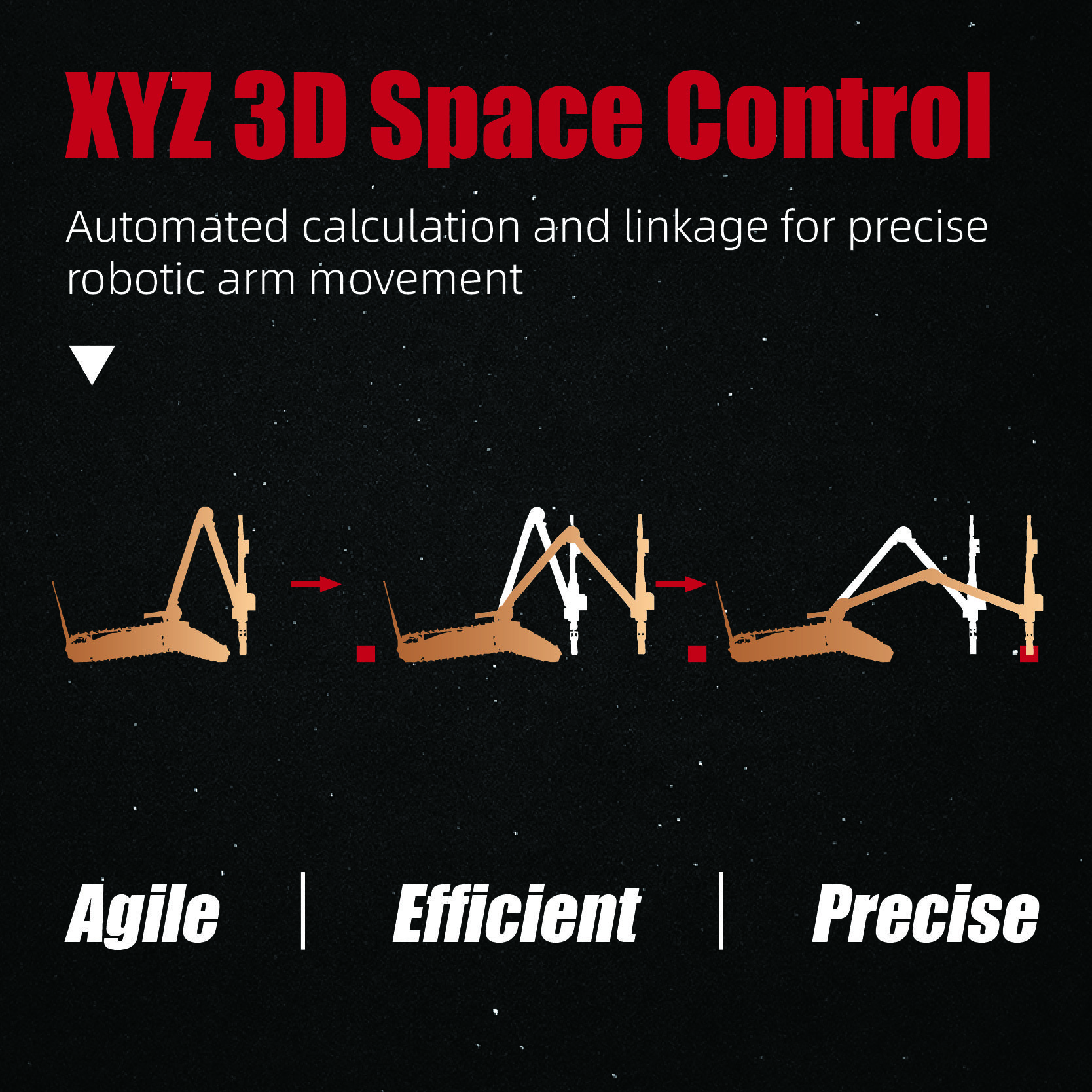
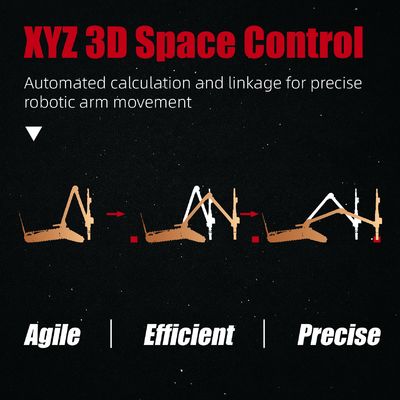
"X-Y-Z" طراحی بازوی رباتیک سه بعدی فضایی
JP REOD500 از یک طراحی سه بعدی پیوند بازوی رباتیک "X-Y-Z" بر اساس محاسبات خودکار استفاده می کند و کنترل دقیق بر روی حرکات ربات را فراهم می کند.این طراحی باعث افزایش کارایی و دقت وظایف تخریب بمب می شود، کاهش متوسط زمان کار تا 80٪ در مقایسه با کنترل تک مفصل سنتی.
سیستم ویدئویی 7 کانال ️ چشم انداز مشاهدات غنی تر
مجهز به یک سیستم ویدئویی 7 کانال، JP REOD500 زاویه های مشاهده متعدد را برای افزایش آگاهی از وضعیت فراهم می کند.حالت گرفتگی اصلی، و حالت گرفتگی کمکی، با شرایط عملیاتی برای مشاهده بهینه سازگار است.
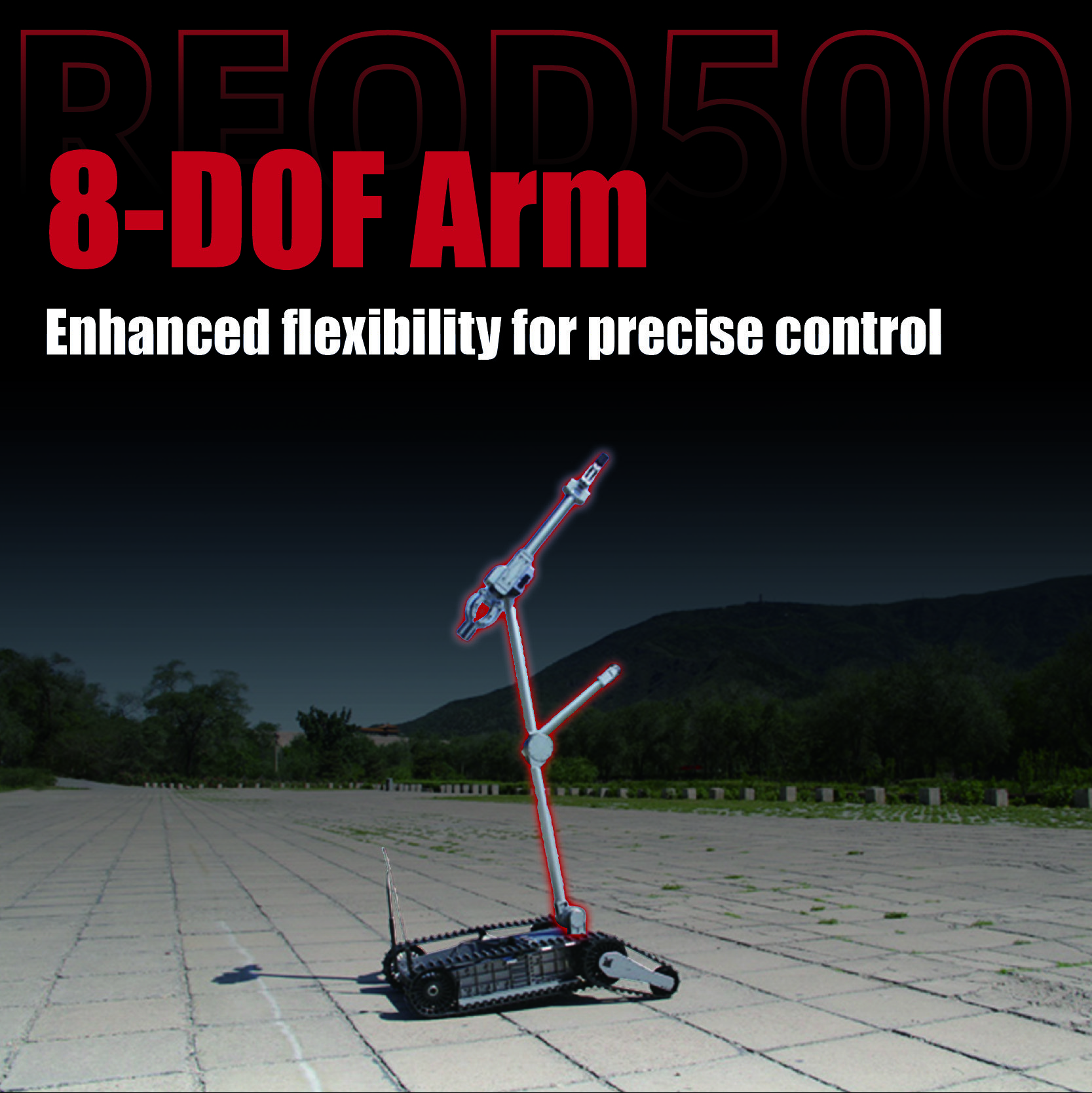
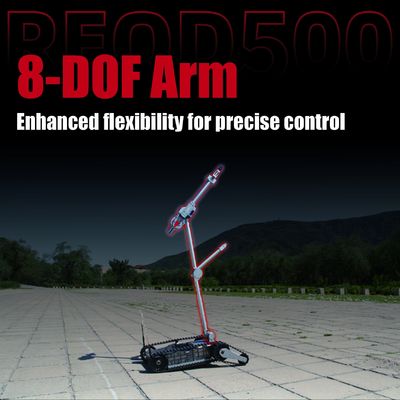
طراحی بازوی رباتیک با 8 درجه آزادی
طراحی بازوی رباتیک 8 درجه آزادی به JP REOD500 توانایی های گسترده فضایی را می دهد و به آن امکان می دهد تا کارهای خود را در محیط های بالا، پایین، عمیق یا روی میز انجام دهد.این انعطاف پذیری آن را برای طیف گسترده ای از عملیات EOD که نیاز به دقت و سازگاری مناسب می کند.
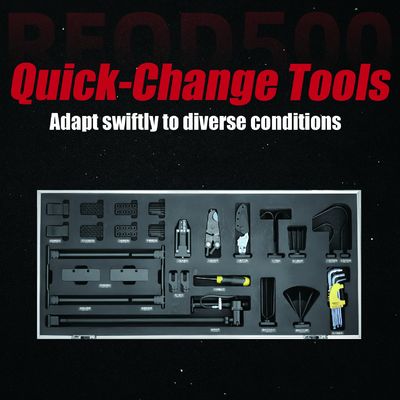
سیستم ابزار چند منظوره و سریع تغییر می کند
JP REOD500 مجهز به یک سیستم ابزار چند منظوره با تغییر سریع است که شامل مجموعه های ابزار گرفتگی متعدد، مجموعه های ابزار پایه و مجموعه های ابزار گسترده است.این ابزارها می توانند به سرعت بر اساس الزامات عملیاتی خاص جایگزین شوند، که این امکان را به ربات می دهد تا به صورت یکپارچه با شرایط مختلف کار سازگار شود و به طور موثر با انواع مختلف خطرات مقابله کند.
درخواست ها
گالری تصاویر
پارامترهای فنی
| پلتفرم ربات | |
|
اندازه |
≤950×650×650mm ((به طور کامل بسته بندی شده) |
|
وزن |
≤50kg ((دو مجموعه باتری دارد) |
|
حداکثر سرعت |
≥2m/s ((۵ دنده، متغیر مداوم) |
|
از توانایی های مانعی |
≥400 میلی متر |
|
عرض شکاف |
≥400 میلی متر |
|
درجه بندی |
≥45° |
|
از پله ها بالا برو |
≥45° |
|
عمق آب |
≥200 میلی متر |
|
عمر باتری ((در دمای عادی) |
≥3 ساعت |
|
عملکرد گرفتن بازوی رباتیک |
|
|
طول بازو |
2000 میلی متر |
|
حداکثر وزن اسنپ |
≥40 کیلوگرم |
|
پنجه ها |
2 |
|
مفاصل متحرک |
8 |
|
کنترل کننده قابل حمل |
|
|
اندازه |
≤270mm×170mm×100mm |
|
وزن |
≤1.2kg ((بدون کوله پشتی) |
|
صفحه نمایش |
صفحه نمایش LCD 7' |
|
نمایش ویدیو |
7-کانال، یکی از آن ها دارای عملکرد ژوم فوکوس اتوماتیک است |
|
روش کار |
عملکرد دو حالت دکمه های تکان دهنده و صفحه لمسی |
|
روش کنترل |
کنترل کابل ≥100m ((کابل استاندارد) ، کنترل بی سیم ≥1000m ((خارج) |
|
سطح حفاظت و سازگاری با محیط زیست |
|
|
پلتفرم ربات |
IP66 |
|
بازو |
IP66 |
|
دمای کار |
-40°C+50°C |
|
دمای ذخیره سازی |
-45°C+60°C |
با ما تماس بگیرید
خانم ايمي
ایمیل:امي-هانگ@mysmech.com
محصولات توصیه شده