





















همه محصولات
ربات های EOD هوند-I








| محل منبع | چین |
|---|---|
| نام تجاری | Particle |
| شماره مدل | REOD400 |
| قیمت | $102,881 |
| شرایط پرداخت | T/T |

برای نمونه ها و کوپن های رایگان با من تماس بگیرید.
WhatsApp:0086 18588475571
ویچت: 0086 18588475571
اسکایپ: sales10@aixton.com
اگر شما هر گونه نگرانی دارید، ما 24 ساعت کمک آنلاین ارائه می دهیم.
xجزئیات محصول
| اندازه | ≤830mm×600mm×460mm (به طور کامل ذخیره شده) | وزن | ≤37 کیلوگرم (حاوی دو مجموعه باتری) |
|---|---|---|---|
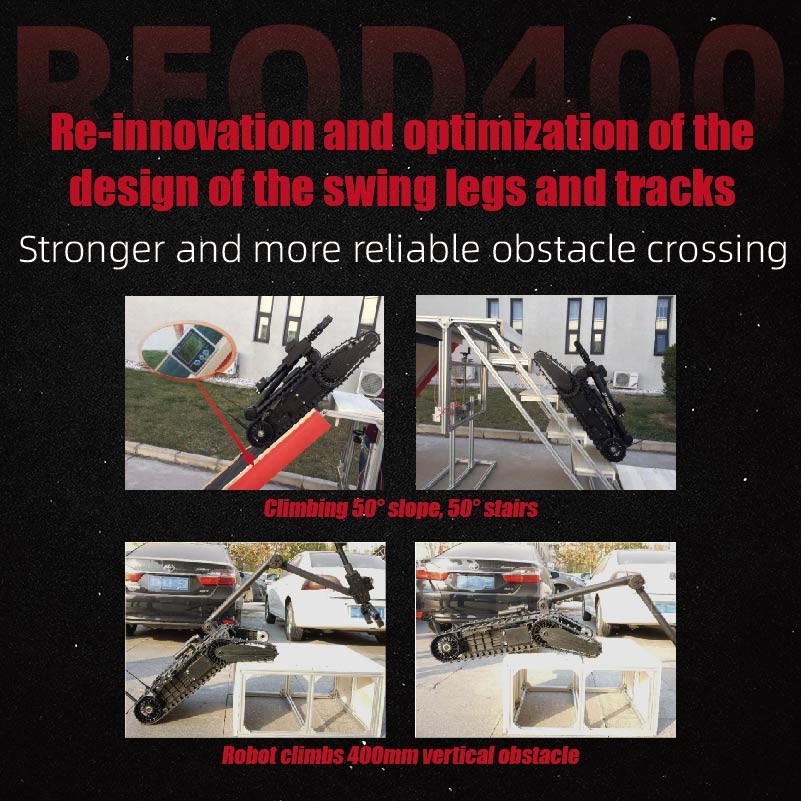
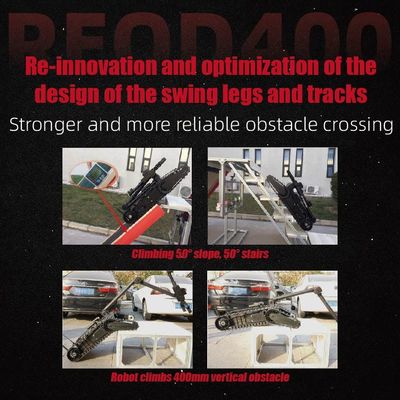
| توانایی بیش از مانع | ≥300 میلی متر | عرض شکاف | ≥400 میلی متر |
| درجه بندی | ≥45 درجه | از پله ها بالا برو | ≥45 درجه |
| مفاصل متحرک | 8 | دورترین فاصله گرفتن | ≥1650mm |
| حداکثر عرض باز شدن دستگیره | ≥160 میلی متر | ظرفیت بالابر | 6-16 کیلوگرم |
| روش عملیات | دو حالت کار با دکمه و صفحه لمسی | روش کنترل | کنترل کابل≥ 100 متر (کابل استاندارد)، کنترل بی سیم≥ 1000 متر (در فضای باز) |
| عمر باتری (دمای معمولی) | ≥2 ساعت | درجه IP | IP66 |
| برجسته کردن | ربات های هوند ایود,ربات هاي تخليه مواد منفجره,دستگاه ربات سبک وزن,Explosive Ordnance Disposal eod robots,Lightweight robot eod |
||
توضیحات محصول
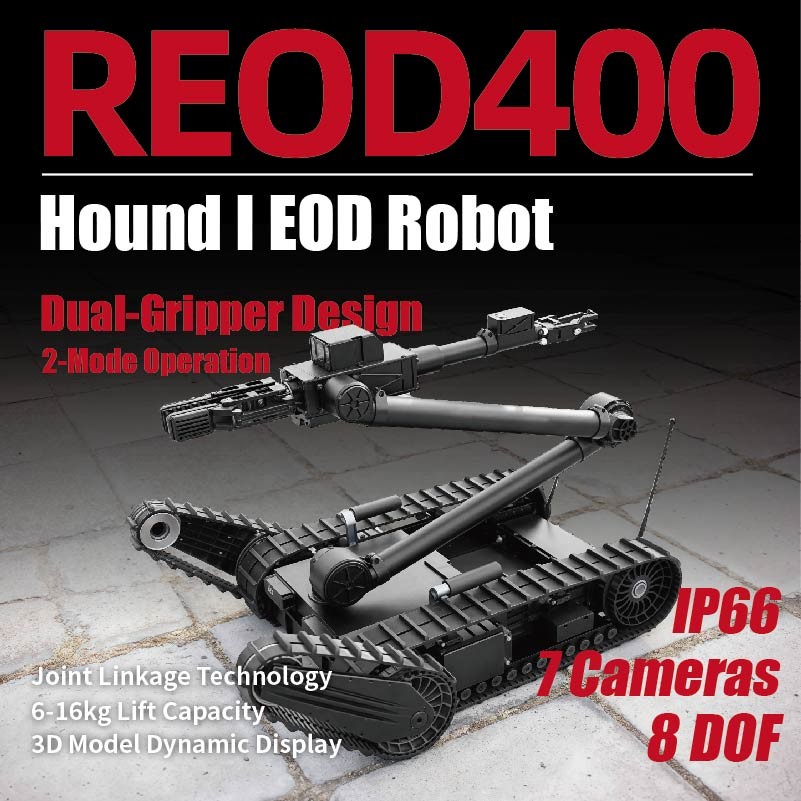
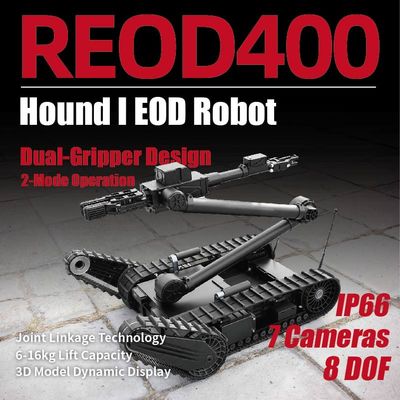
ربات هوند-I برای دفع سلاح های انفجاری سبک وزن
توضیحات و ویژگی ها
ربات REOD400 EOD یک راه حل پیشرفته برای دفع سلاح های انفجاری (EOD) در محیط های پرخطر است. با طراحی منحصر به فرد "دو گرفتگی" ، می تواند به طور همزمان وظایف مختلفی را انجام دهد ،که باعث می شود آن را بسیار کارآمد برای عملیات مانند مبارزه با تروریسم شهری، ایمنی عمومی، کمک به زلزله و دفع بمب. این ربات جمع و جور و سبک وزن است، با ابعاد ≤830mm × 600mm × 460mm (به طور کامل ذخیره شده) و وزن ≤37kg.حداکثر سرعت ≥1.8m/s با 5 دنده و یک درایو متغیر مداوم، فاصله مانع ≥300mm و قابلیت ارتفاع و توانایی صعود پله تا 45°،تضمین مانور پذیری و سازگاری عالی در زمین های مختلف.
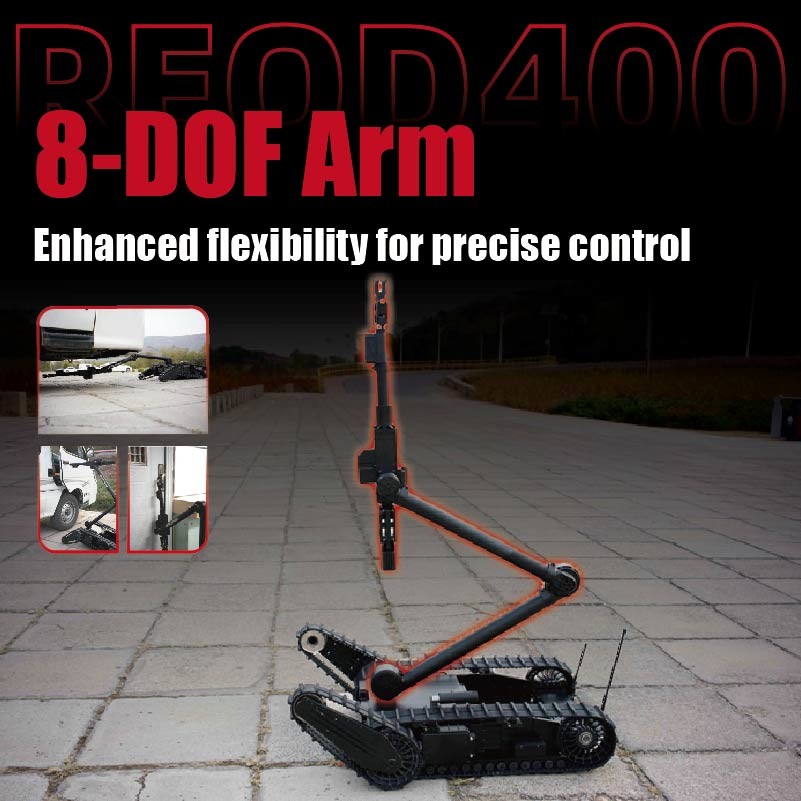
مجهز به 8 درجه آزاديدستکاری کننده، REOD400 کنترل دقیق را با حداکثر ارتفاع گرفتن ≥1700mm (پوش اصلی) و دورترین فاصله گرفتن ≥1380mm (پوش اصلی) ارائه می دهد. ربات از یک صفحه نمایش ویدیویی 7 کانال پشتیبانی می کند،امکان مشاهده چشم انداز های غنی تر، و دارای قابلیت های نمایش 3D حالت از راه دور در زمان واقعی است. با عمر باتری ≥ 2 ساعت در دمای طبیعی، رتبه IP66 برای مقاومت در برابر گرد و غبار و آب،و روش های کنترل شامل کنترل کابل تا 100 متر و کنترل بی سیم تا 1000 متر، REOD400 برای قابلیت اطمینان و انعطاف پذیری در شرایط چالش برانگیز ساخته شده است. علاوه بر این، گزینه های سفارشی سازی OEM و ODM را برای پاسخگویی به نیازهای عملیاتی خاص ارائه می دهد.
طراحی نوآورانه "گرفتن دوگانه" ️ افزایش انعطاف پذیری و امکان پذیری در اجرای کار
طراحی نوآورانه "Dual Gripper" دارای یک بازوی رباتیک مجهز به هر دو "پوش گیری اصلی" و "پوش تمدید چند عملکردی" است.این طراحی به شدت انعطاف پذیری و امکان انجام وظایف روبات را افزایش می دهد، ارائه پشتیبانی موثر برای انجام وظایف مختلف در یک عملیات واحد.طراحی دو گیره به طور موثری محدودیت های روبات های ضد بمب سنتی را برطرف می کند که فقط یک گیره دارند،" که نمی تواند همزمان وظایف مانند "گرفتن اشیاء خطرناک" و "باز کردن درها، برش، قفل کردن، قطع، قلاب و سایر اقدامات کمکی را انجام دهد". به عنوان مثال،می تواند وظایف مانند "باز کردن یک درب و گرفتن یک شی را در یک بار انجام دهد. "
طراحی "Dual Gripper" با موفقیت "پوشگر اصلی" را از انجام وظایف غیر از گرفتن آزاد می کند، بنابراین به طور قابل توجهی توانایی های گرفتن روبات را افزایش می دهد.پنجه ي اصلي مي تونه موادي مشکوک و خطرناک با وزن 6 تا 16 کيلوگرم رو بگيره، با عرض گرفتن تا 160 میلی متر و حداکثر نیروی چسبندگی 300 N. علاوه بر این، بسته به وظایف عملیاتی خاص،"سیت ابزار گیرنده" می تواند به سرعت برای دست زدن به انواع مختلف و اشکال اقلام خطرناک جایگزین شود..
پشتیبانی از کنترل لمس / جویستیک ٫ تعامل دوستانه تر و عملکرد قابل اعتماد
طراحی عملیات کنترل گرافیکی لمس / جویستیک در حال حاضر یک راه حل کنترل ربات ضد بمب پیشرو در سطح بین المللی است.آن را به شدت توسط کاربران به خاطر تعامل کاربر پسند تر و عملکرد قابل اعتماد شناخته شده استویژگی های اصلی آن عبارتند از:
- طراحی عملیاتی گرافیکی:تمام عملیات به صورت گرافیکی طراحی شده اند، که نیاز کاربران به حفظ تکه های پیچیده و پروتکل های عملیاتی را از بین می برد.این رابط کاربری دوستانه باعث می شود که کار ساده و بصری باشد، که زمان آموزش را به طور قابل توجهی کاهش می دهد.
- طراحی عملیات کنترل لمس / جویستیک:هر دو دکمه های جویستیک و یک صفحه لمسی می توانند برای انجام تمام عملیات ربات استفاده شوند.افزونه ای که توسط این دو روش عملیاتی فراهم می شود نه تنها قابلیت اطمینان سیستم را افزایش می دهد بلکه همچنین با ترکیب دکمه های جویستیک با کنترل های صفحه لمسی، بهره وری عملیاتی را بهبود می بخشد.
|
|
نمایشگر 3D از راه دور در زمان واقعی ️ نزدیک در دست، عملکرد بصری تر
از آنجایی که ربات های پاک کننده بمب اغلب در طول ماموریت ها از خط دید خارج عمل می کنند، اطلاعات زمان واقعی در مورد زاویه ها و موقعیت های فضایی مفاصل ربات برای اپراتورها بسیار مهم است. The REOD400 uses high-speed links and advanced computer technology to not only achieve real-time feedback of the robot's status information but also to employ leading 3D virtual display technology for remote real-time display of the robot's 3D statusاین باعث می شود ربات احساس کند "نزدیک دست" حتی زمانی که "دور" است، اجازه می دهد تا برای عملیات بصری تر.
ویژگی های اصلی نمایشگر 3D در زمان واقعی از راه دور عبارتند از:
- نمایش در زمان واقعی وضعیت سه بعدی ربات
- مشاهده وضعیت سه بعدی ربات از زاویه های مختلف
- نزدیک شدن و خارج شدن از وضعیت سه بعدی ربات
کنترل کننده دستی روبات وضعیت 3D از راه دور روبات را بازتولید می کند، به این ترتیب مدل 3D می تواند بزرگ شود، بزرگ شود و از هر زاویه ای مشاهده شود.
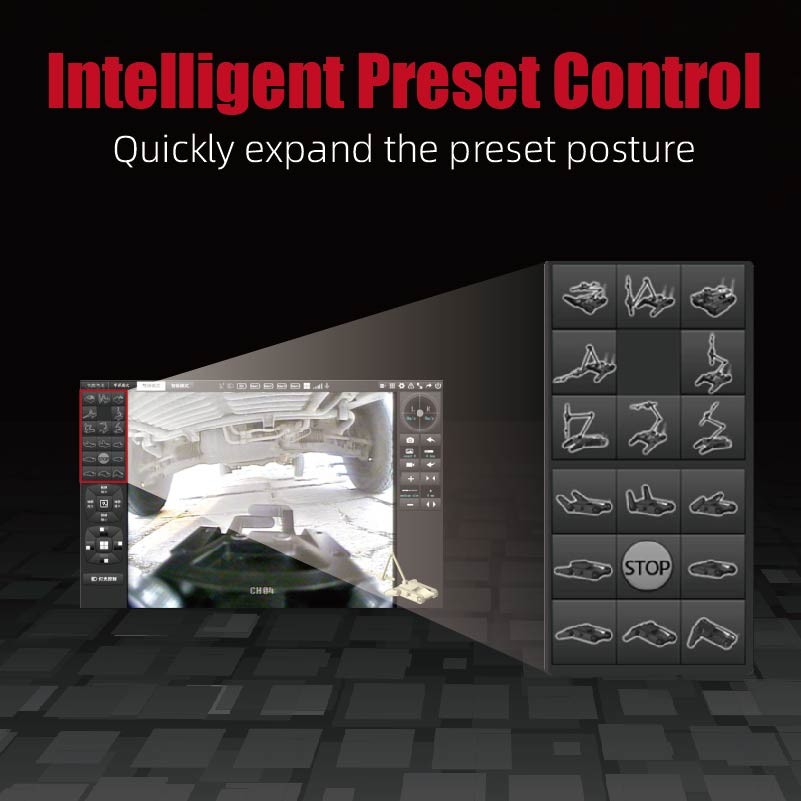
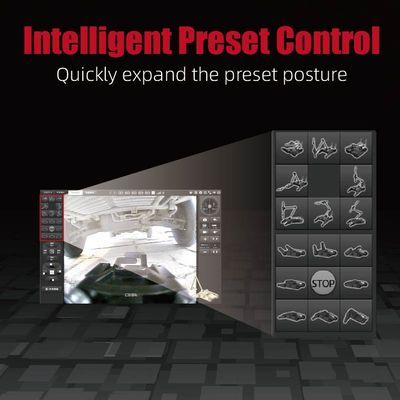
طراحی هوشمند کنترل حالت پیش تنظیم شده
با استفاده از "کنترول حالت پیش تنظیم هوشمند برای وظایف معمول"، این ربات می تواند "به طور خودکار با یک کلیک به یک موقعیت پیش تنظیم شده برسد" بر اساس نیازهای کاربر.این ویژگی به شدت مقدار کار دستی مورد نیاز در محل را کاهش می دهد، به عنوان یک دستیار موثر برای اپراتورهای خط مقدم عمل می کند و قابلیت اطمینان و ایمنی وظایف تخریب بمب را افزایش می دهد.
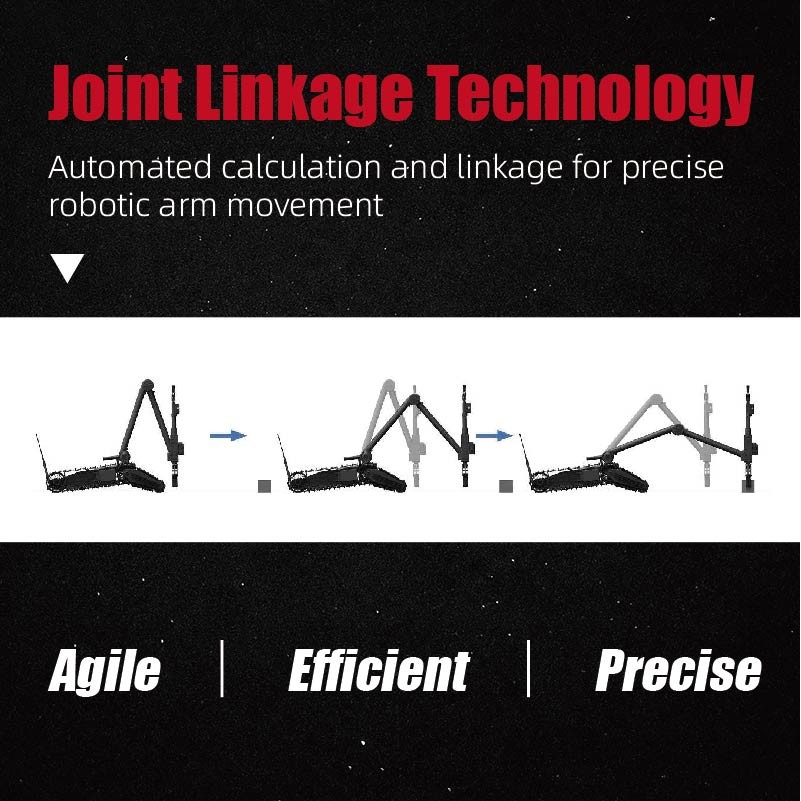
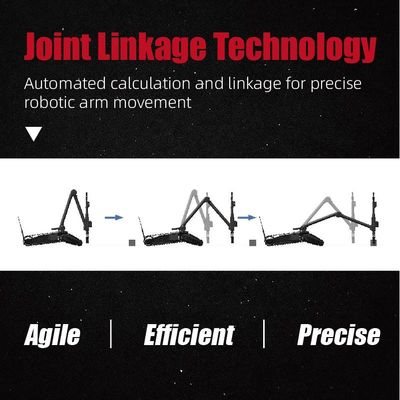
تکنولوژی اتصال مفصل "X-Y-Z" کنترل دقیق تر و کارآمدتر
طراحی عملیات تکنولوژی اتصال مشترک X-Y-Z مبتنی بر محاسبه خودکار، همچنین به عنوان "طراحی کنترل ترجمه گیره مبتنی بر مختصات کارتیزیان" شناخته می شود." کنترل روبات هاي تخليه بمب رو به کنترل هماهنگ چند مفصل تبديل ميکنه "این به طور قابل توجهی کارایی عملیاتی و دقت ربات های پاک کننده بمب را بهبود می بخشد. در مقایسه با طراحی کنترل "یک مفصل"، میانگین زمان عملیات را 80٪ کاهش می دهد.
REOD400 از طریق محاسبات اتوماتیک "کنترول ترجمه گیره مبتنی بر مختصات کارتیزی" را به دست می آورد. برای گرفتن اقلام مشکوک خطرناک در یک فضای یک بعدی افقی،آن را به سرعت کنترل ربات به دست آوردن "متعدد مفصل حرکت هماهنگ" برای ترجمه یک بعدی فضای گرفتراین امر به شدت مشکل عملیاتی را کاهش می دهد و دقت را افزایش می دهد، اجازه می دهد تا موقعیت تقریبا فوری بدون نیاز به تکرار تکرار شود.
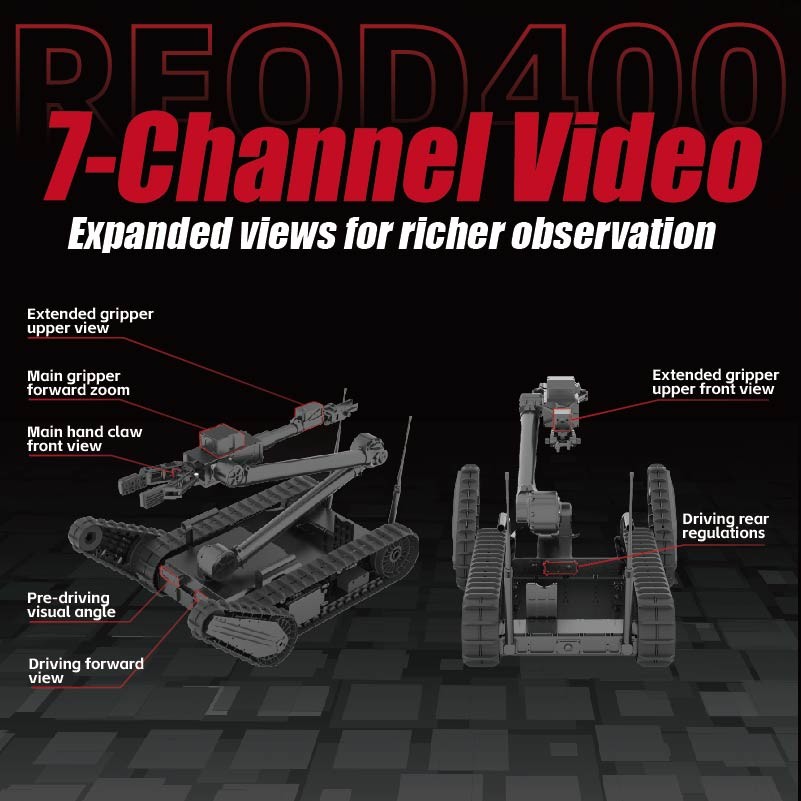
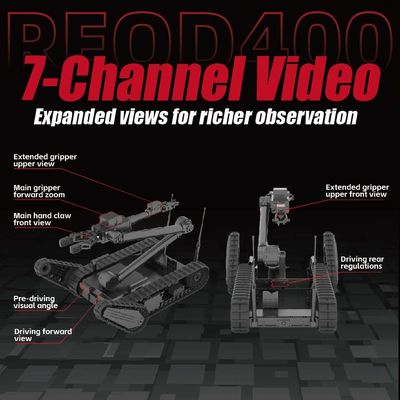
سیستم تصویربرداری سازگار با حالت ۷ دیدگاه دوربین برای مشاهده بهتر
سیستم تصویربرداری ربات به عنوان چشم های اپراتور عمل می کند. REOD400 دارای طراحی سیستم تصویربرداری سازگار با حالت نوآورانه با یک سیستم دوربین 7 است.افزایش قابل توجهی از توانایی اپراتورهای خط مقدم برای درک محیط های دورطراحی سیستم ۷ دوربین یک ترتیب ساده نیست بلکه یک بهبود و بهینه سازی بر اساس مشکلات روبرو شده توسط کاربران در طول استفاده واقعی است.
سیستم تصویربرداری به طور کلی به سه ترکیب تصویر تقسیم می شود: حالت رانندگی، حالت گرفتر اصلی و حالت گرفتر گسترده.آن را به طور خودکار بین این حالت بر اساس وظایف معمولی مانند رانندگی، گرفتن و مشاهده، ارائه آگاهی قوی تر از محیط زیست از راه دور و طیف غنی تر از زاویه های مشاهده.
طراحی بازوی رباتیک یکپارچه با هشت درجه آزادی کنترل انعطاف پذیرتر و ایمن تر
بازوی رباتیک REOD400 دارای یک طراحی یکپارچه 8 درجه آزادی است، که قابلیت دسترسی فضایی قوی را فراهم می کند.این طراحی به بازوی رباتیک اجازه می دهد تا نه تنها وظایف معمولی تخریب بمب را انجام دهد بلکه عملیات هایی را نیز انجام دهد که ربات های معمولی تخریب بمب 5 درجه یا 6 درجه آزادی نمی توانند انجام دهند، مانند گرفتن اشیاء در محیط های بالا، پایین، عمیق یا سطح میز، و همچنین انجام شناسایی چند زاویه ای در محیط های بالا، پایین و عمیق.
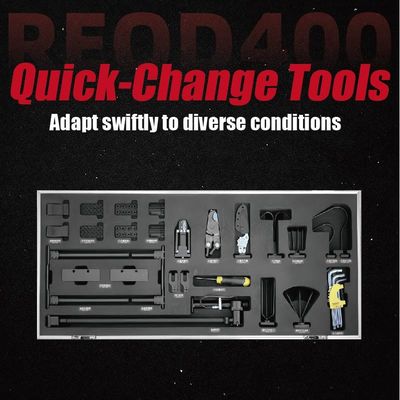
سیستم ابزار قابل تغییر سریع
ربات REOD400 مجهز به 18 نوع ابزار تغییر سریع است، از جمله 6 مجموعه ابزار گرفتن، 6 مجموعه ابزار پایه، و 6 مجموعه ابزار گسترش یافته،امکان تعویض سریع "سیت ابزار گیرنده" بر اساس وظایف عملیاتی مختلف و انواع و اشکال اشیاء خطرناک مختلف، در نتیجه نیازهای عملیاتی متنوع کاربران را برآورده می کند.
درخواست ها
گالری تصاویر
پارامترهای فنی
|
پلتفرم ربات |
|
|
اندازه |
≤830×600×460mm ((به طور کامل بسته بندی شده) |
|
وزن |
≤37kg (دو مجموعه باتری دارد) |
|
حداکثر سرعت |
≥ 1.8m/s ((۵ دنده، متغیر مداوم) |
|
از توانایی های مانعی |
≥300 میلی متر |
|
عرض شکاف |
≥ 400 میلی متر |
|
درجه بندی |
≥45° |
|
از پله ها بالا برو |
≥45° |
|
عمر باتری ((در دمای عادی) |
≥2 ساعت |
|
درجه IP |
IP66 |
|
عملکرد گرفتن بازوی رباتیک |
|
|
وضعیت گسترش یافته |
≥6kg |
|
کشور خارج شده |
≥16 کیلوگرم |
|
پنجه ها |
2 |
|
مفاصل متحرک |
8 |
|
حداکثر ارتفاع مشاهده |
≥۲۴۰۰ میلی متر |
|
حداکثر ارتفاع گرفتن |
≥۱۷۰۰ میلی متر(پنجه اصلی),≥2000 میلی متر(دستگير) |
|
دورترین فاصله گرفتن |
≥1380 میلی متر(پنجه اصلی)≥1650mm(دستگير) |
|
حداکثر عرض باز شدن گیره |
≥160 میلی متر |
|
کنترل کننده قابل حمل |
|
|
اندازه |
≤۳۶۰×۲۱۰×۷۰ میلی متر |
|
وزن |
≤2kg ((بدون کوله پشتی) |
|
صفحه نمایش |
10.1' LCD |
|
نمایش ویدیو |
7-کانال |
|
روش کار |
عملکرد دو حالت دکمه های تکان دهنده و صفحه لمسی |
|
روش کنترل |
کنترل کابل ≥100m ((کابل استاندارد) ، کنترل بی سیم ≥1000m ((خارج) |
با ما تماس بگیرید
خانم ايمي
ایمیل:امي-هانگ@mysmech.com
محصولات توصیه شده